我们需要为重建的人头添加一个背景。其中一个方案是,直接找到一张全景图,背景、光照都从全景图中来。
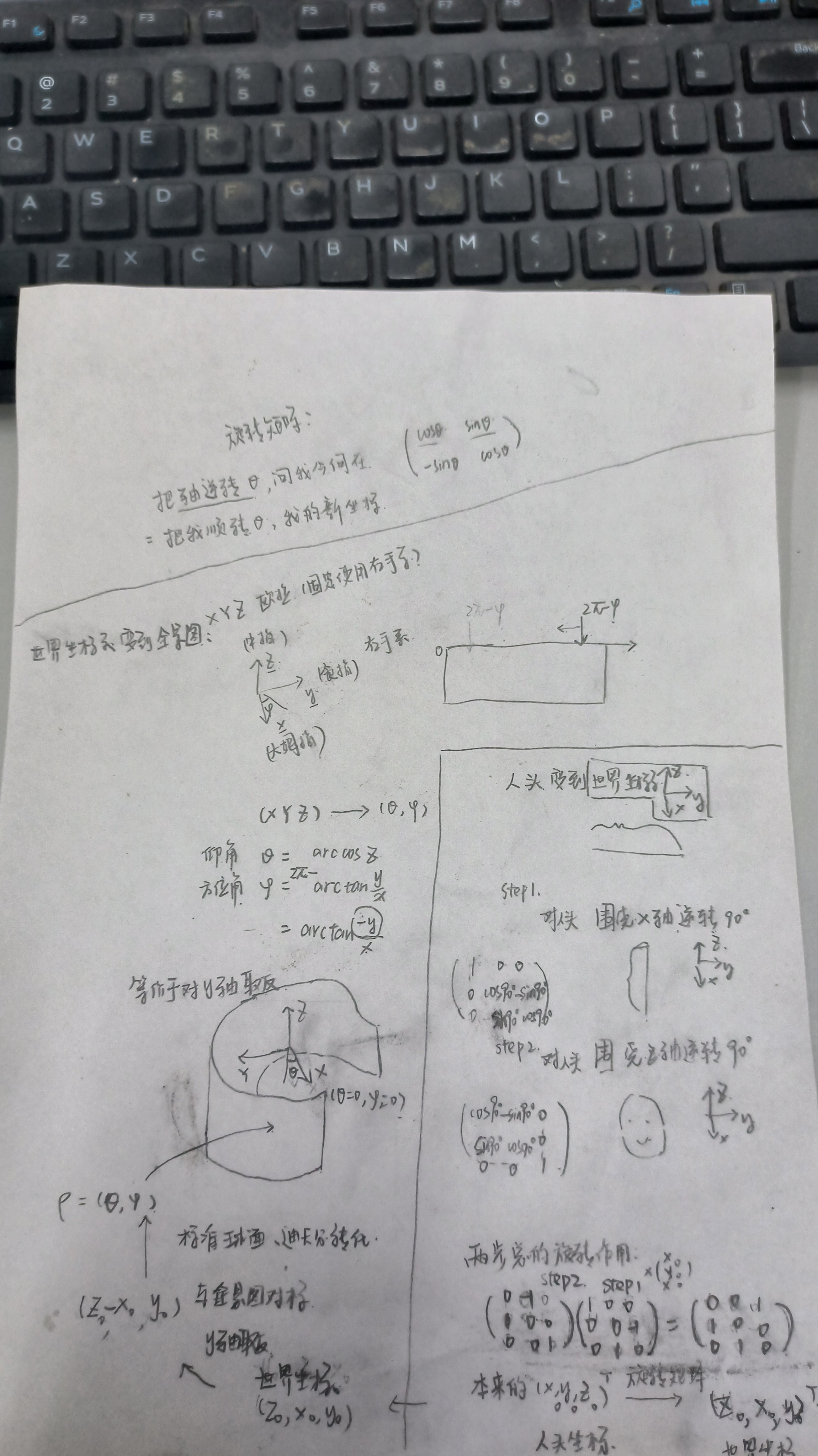
球面坐标与欧式坐标之间的转化
从全景图中采样出背景图,这个过程涉及到球面坐标和标准欧式坐标之间的转换。
查阅资料后,我了解到球面坐标系与标准欧氏坐标系之间(空间直角坐标系)之间有固定的转化公式。球极坐标中的仰角、方位角在标准欧式坐标中怎么画,都是有规定的。

仰角-方位角
在全景图中,假如采用“仰角elevation-方位角azimuth”的方式确定像素的位置,那么使用上述标准的转换公式即可。例如,EMLight里有这样的写法:
1 | # 笛卡尔坐标系(标准欧氏坐标系、空间直角坐标系)->极坐标(球面坐标系) |
由于仰角和方位角经常用$\theta$和$\phi$表示,代码里经常用theta和phi代指仰角和方位角。
经度-纬度
但也有的时候,全景图被看成一张世界地图,以经纬度标记像素位置。
全景图拍摄时,相机往往将镜头对准正北方向进行拍摄。此时,图片的正中央对应地理坐标的北纬方向,经度为0度。
随着视角向东移动,经度值逐渐增加;向西移动,经度值逐渐减小。当视角转到正南方向时,经度达到最大值180度或最小值-180度。
所以在全景图中,不管相机的朝向如何,经度为0的位置通常都在图片的正中央,表示北纬方向。这与我们平时看地图的习惯也是一致的。
所以,在经纬度描述的全景图中,中心位置才是O点,经度纬度都是0。左上角是成了纬度为90度,经度为-180度的点。此时代码里常用经纬度的英文,即Longitude and latitude。以下是来自Stack Overflow的代码,将经纬度转笛卡尔。可以看到,其与上面一种“仰角-方位角”的主要区别就在于,套在lat外的sin和cos是相反的。
1 | # Converting lat/long to cartesian |
反转可以这样写:
1 | # 三维空间坐标到经纬度坐标的转换函数 |
当lat和lon都为0时,xyz=[1,0,0]。
相机成像过程中的多个参考坐标系
从全景图采用背景,需要知道相机在世界坐标系中的朝向;根据人头表面法向采集光照,也需要知道人头坐标系中的法向如何转化到世界坐标系中。
首先,应当明确,相机拍照的过程,是把世界坐标系中的点捕获到相机坐标系,再通过凸透镜投影到像平面上,最终放到像素平面上的。
相机的内参和外参矩阵表明了如何做这一系列转化。
外参矩阵
外参矩阵worldToCamera,能够将世界坐标系中的点$P^W$的坐标转成相机坐标系中的坐标$P^C = P^W * worldToCamera$。外参矩阵是4$ \times$4的矩阵,左上角的3$ \times$3负责旋转,最后一列负责平移。在三维重建中,可能外参矩阵的逆矩阵cameraToWorld更有意思。它能把相机坐标系中的点放回世界坐标系中。同时,它的前三列分别对应$cameraToWorld * [1,0,0]^T$、$cameraToWorld * [0,1,0]^T$、$cameraToWorld * [0,0,1]^T$的结果,即相机坐标系xyz三个轴在世界坐标系中的真实指向。cameraToWorld的第四列则直接表明相机在世界坐标系中的位置。
下面这个函数是个例子,讲述如何从外参矩阵中提取这些有用信息。外参矩阵暗示相机在世界坐标系中的位置和朝向,因而这个函数名为setCameraPose,即和相机的Pose有关。
1 | # 根据相机外参矩阵设置相机参数 |
相机坐标系中z轴的朝向一般就是相机的朝向,而外参矩阵的第三列就是我们需要的相机在世界坐标系中的朝向。
内参矩阵
外参指的是相机与外部世界之间的关系,内参则决定相机坐标系中的点如何变化到像平面、像素平面上。这部分的变换都是二维上的变换,主要用到三角形相似定理。相机坐标系中的任意一点(x,y,z),等比例相似变换到像平面中,成了(x’,y’,f)。$f$是焦距。x’,y’,f的单位就是真实世界里的长度单位,只不过比米小很多,一般是毫米。
$$
x/x’ = y/y’ = z/f
$$
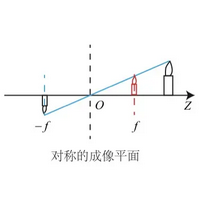
然而,像平面上的图像,最终要转化成像素组成的像素平面上(即最终看到的图像)。此时有是一次等比例放缩,数值放缩多少由传感器中一个像素的长和宽决定。像素越小,则同样的像平面最终获得的像素图越大。此时,还要把原点从光心挪到图片左上角。最终的像素图为(u,v):
$$
u = \alpha x’ + c_x = \alpha xf/z + c _x ;\
v = \beta y’ + c_y = \beta yf/z + c_y
$$
$c_x、c_y$的单位都是像素,即光心在像素图上的位置,一般是像素平面长和宽的一半。原先的$f/z$用于将相机坐标系中的点放缩到像平面中。这里又额外有了像平面到像素的放缩因素$\alpha$,因此可以把这两个放缩因素打包成$f_x /z = \alpha f/z$,表示从相机坐标系到最终像素坐标的直接放缩,跳过中间的像平面。
$$
u = f_x x/z+ c _x ;\
v = f_y y /z+ c_y
$$
内参矩阵:
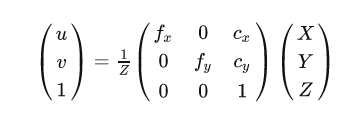
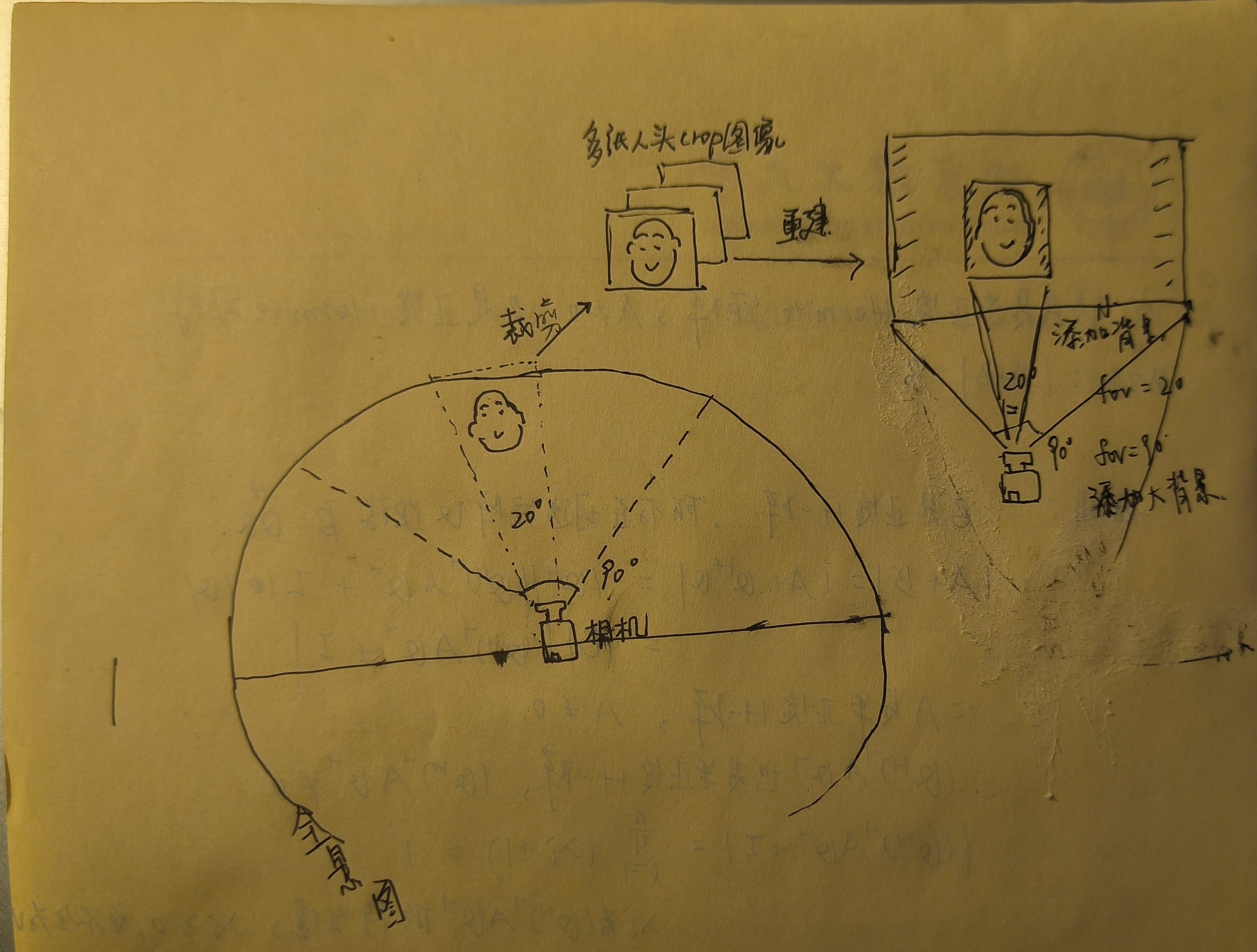
在我们的任务中,相机内参主要用来求视角fov。视角可以从象平面(或像素平面)的高及其到镜头的距离之比求出。这里使用像素平面高的一半$c_y$和深度$f_y$求垂直视角范围:
$$
fov = 2* arctan( c_y / f_y )
$$
实际求出vfov等于20度这样。这样小的fov,从全景图上抠出来的背景包含的内容也会很少,但刚好对应人头的背景大小。而一半人头所占的fov只是原视频中的一部分,原相机完整视频的fov可能是20度的好几倍,如下图所示:
人头坐标系与全景图坐标系的对准
我们定义一个世界坐标系,假设全景图都是在水平面上转360度采集的,那么把全景图直接围在世界坐标系中即可。
在人头重建任务中,人头坐在的坐标系就是世界坐标系。而相机相当于在世界坐标系中游走,带着相机坐标系不断变化。但是,一旦要把人头和背景结合,此时要明确一个问题:全景图所在的世界坐标系才是真正的世界坐标系,将人头放置到全景图环绕的世界中时,人头所在的坐标系自动降格成一个物体坐标系,我称之为“人头坐标系”。
那么此时,就有个五个坐标系。每一级包含下一级:
- 全景图所在的世界坐标系
- 人头坐标系
- 相机坐标系
- 像平面
- 像素平面
- 像平面
- 相机坐标系
- 人头坐标系
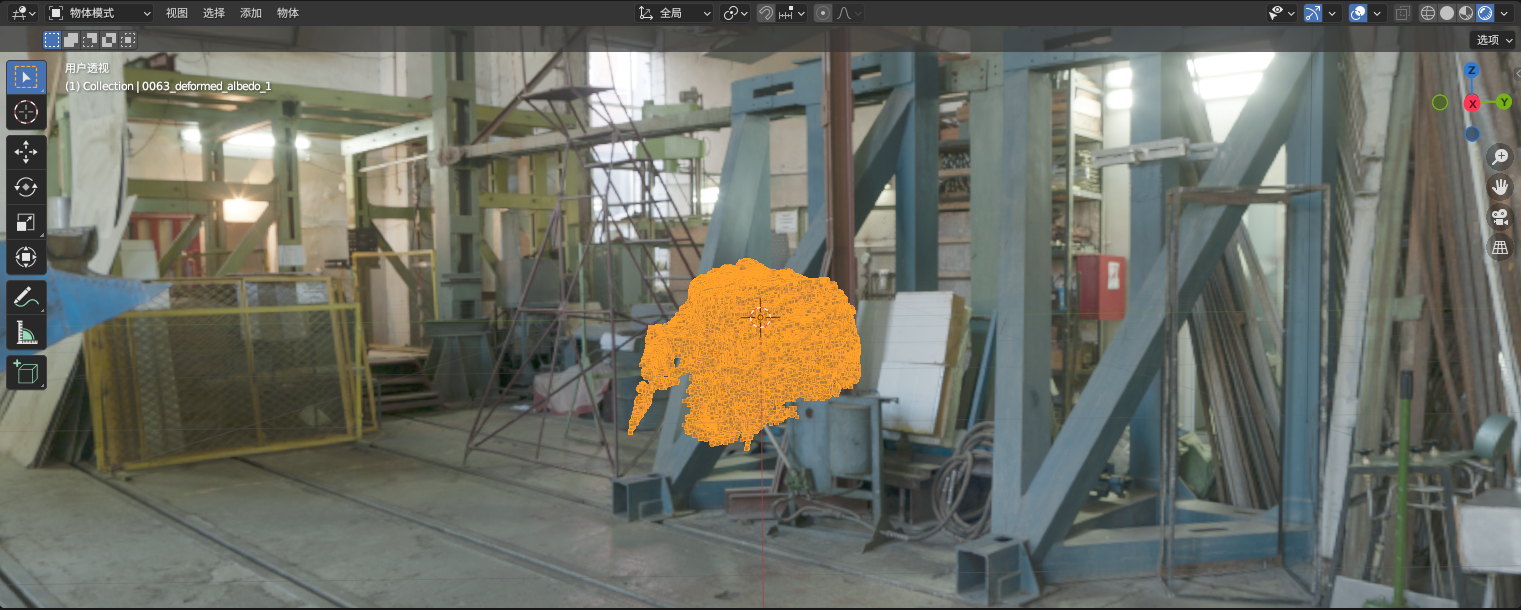
后四个坐标系之间的关系,我们已经通过前面的内参外参矩阵明确了。此时需要明确人头坐标系和世界坐标系之间的关系。此时,我们把重建出的一个人头导入放置好全景图的世界中,发现人头是平躺着、面朝上的:
而我们希望人头是正对着我们的。此时,需要对人头坐标系做一个旋转。相对世界坐标系,对人头(人头坐标系)围绕x轴转90度,使其摆正;再围绕z轴旋转90度,使其面向我们。经过两次旋转,在世界坐标系固定为图中(x指出屏幕;y向右;z向上)所示,人头正对着屏幕。
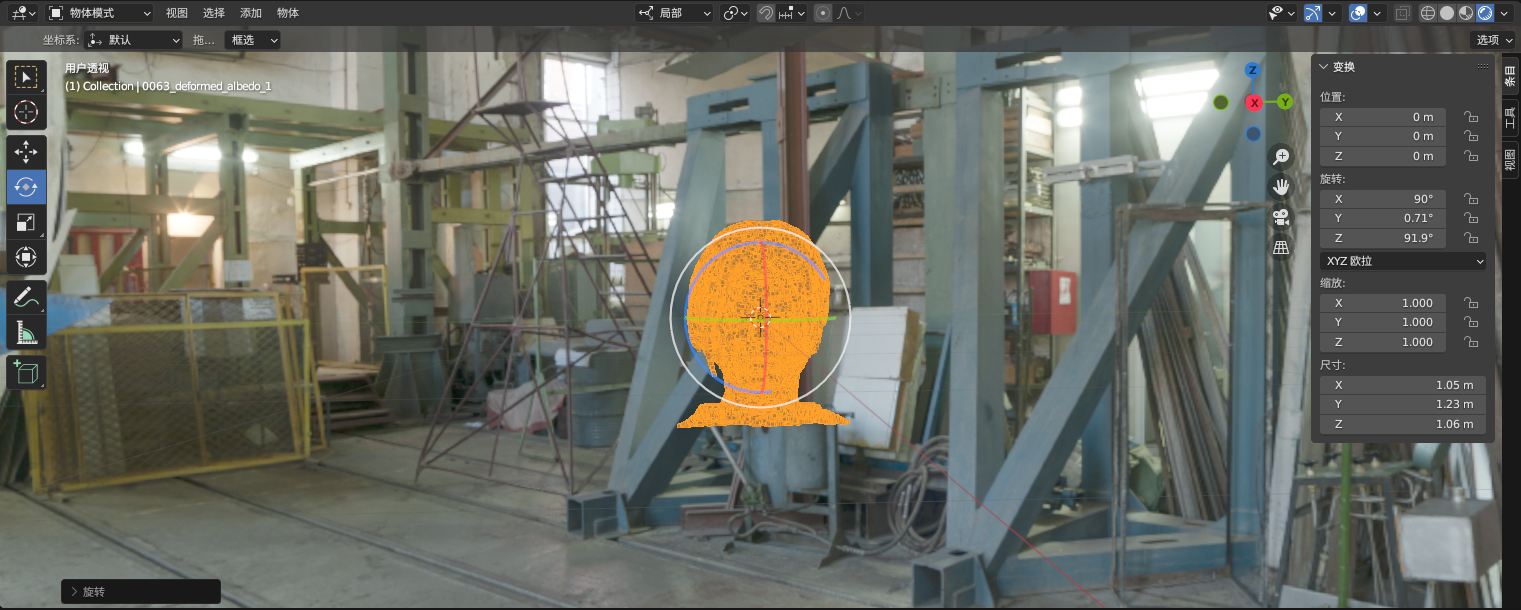
右上角是固定不变的世界坐标系,人头周围的是人头坐标系。
这个旋转其实是把人头坐标系的xyz轴数据当成z-xy。(blender里面铺展全景图的方法和真实的情况有差别,所以看起来是当成zxy)。写成函数:
1 | def headPosition2WorldPosition(position): |
推导过程:
右下角是人头在世界坐标系中旋转变换;中部是世界坐标系和全景图之间的变换(blender里对y轴取反,然后再变换并显示的);上部是旋转矩阵的基本用法。